Mikrokontroler LPC1114 posiada 4 timery (liczniki) ogólnego przeznaczenia, dwa timery 32 bitowe oraz kolejne dwa 16 bitowe. Oczywiście są jeszcze specjalne jak SysTick czy WDT, lecz nie będę ich w tym poście opisywał.
Na rysunku Fig. 80 przedstawiono budowę timera 32 bitowego, budowa timera 16 bitowego jest identyczna poza rozmiarami rejestrów liczących, których wielkość to 16 bitów w związku z czym mogą maksymalnie zliczyć do wartości 65535.
 |
| Fig. 80. Budowa timera |
Timery 16 bitowe nazywają się CT16B0 i CT16B1, oprócz zwykłego odliczania czasu pozwalają na generację sygnału PWM wytwarzanego przez blok timera całkowicie sprzętowo. Poza tym mogą być sterowane poprzez wejście przechwytujące (CAP) np. do bardzo precyzyjnego odmierzania czasu trwania impulsów.
 |
| Rejestry timera 16 bitowego |
Wszystkie rejestry 16 bitowego timera CT16B0 przedstawia tabelka powyżej, podobne rejestry są także w przypadku timera CT16B1 (oczywiście jest inny adres bazowy - więcej w UM). Dla timera CT16B1 nazwy rejestrów są analogiczne, np. TMR16B0IR nazywa się TMR16B1IR.
 |
| Rejestr IR - flagi przerwania |
Rejestr IR informuję, że nastąpiło przerwanie poprzez ustawienie bitu na konkretnej pozycji, odpowiednio zapalony:
- bit 0 - przerwanie od rejestru porównywającego MR0
- bit 1- przerwanie od rejestru porównywającego MR1
- bit 2 - przerwanie od rejestru porównywającego MR2
- bit 3 - przerwanie od rejestru porównywającego MR3
- bit 4 - przerwanie od rejestru przechwytującego CR0
W obsłudze przerwania należy skasować flagę przerwania, ponieważ brak jej skasowania spowoduje ponowne wejście do obsługi przerwania i tak w nieskończoność, zatem mikrokontroler poświęci się tylko obsłudze tego przerwania zamiast wykonywać dalsza cześć programu. Kasując ją informujemy mikrokontroler, że przerwanie został już obsłużone i może powrócić do wykonywania innych instrukcji programu.
Kasowanie flagi następuje poprzez wpisanie 1 na odpowiednim bicie, dlatego należy mieć na uwadze że kasowanie flagi przerwania nie następuje po wpisaniu 0.LPC_TMR16B0->IR = 2; // kasuje flage przerwania od rejestru porywnywującego MR1
LPC_TMR16B0->IR = 8 // kasuje flage przerwania od rejestru porywnywującego MR3
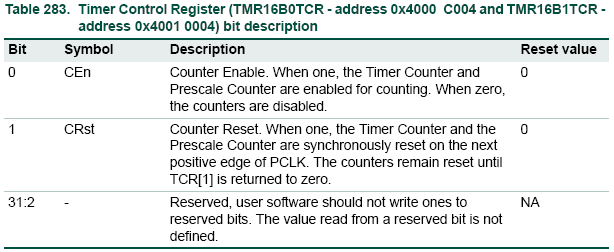 |
| Rejestr TCR - strat / stop timera |
Rejestr TCR służy do startowania i zatrzymywania timera oraz resetu, czyli zerowania rejestru zliczającego TC.
- bit 0 - wartość 0 stop timera, wartość 1 start timera
- bit 1 - ustawienie spowoduje wyzerowanie rejestru TC przy następnym rosnącym zboczu PCLK
- bity 31:2 - nie należy wpisywać wartości 1 !
 |
| Rejestr TC - licznik timera |
Rejestr TC, czyli licznik timera jest inkrementowany za każdym cyklem PCLK z uwzględniem preskalera PR + 1. Licznik jest kontrolowany (start/stop) poprze rejestr TCR.
 |
| Rejestr PR - preskaler |
Rejestr PR jest odpowiedzialny za podział zegara, który dociera do licznika TC i odpowiada za inkrementacje licznika TC. Po resecie jego wartość wynosi 0, zatem jak wyżej wspomniałem inkrementacja TC następuje z każdym cyklem PCLK. Dla PR=1 inkrementacja będzię następowała co 2 cykle PCLK, dla PR=2 co 3 cykle, itd.

Rejestr MCR służy do konfiguracji rekacji uC kiedy licznik TC zliczy do wartości wpisanej w danym rejestrze MRx, np. wygenerowania przerwania kiedy wartość licznika TC będzie taka sama co wpisana do rejestru porównującego MR3.

 |
| Rejestr MCR |
- bit 0 - ustwienie bitu spowoduje wyzerowanie licznika kiedy TC = MCR0
- bit 1 - ustawienie powoduje zatrzymanie licznika kiedy TC = MCR0
- bit 2 - ustawienie powoduje wygenerowanie przerwania kiedy licznik TC = MR0
- bit 3 - ustwienie bitu spowoduje wyzerowanie licznika kiedy TC = MR1
- bit 4 - ustawienie powoduje zatrzymanie licznika kiedy TC = MR1
- bit 5 - ustawienie powoduje wygenerowanie przerwania kiedy licznik TC = MR1
- bit 6 - ustwienie bitu spowoduje wyzerowanie licznika kiedy TC = MR2
- bit 7 - ustawienie powoduje zatrzymanie licznika kiedy TC = MR2
- bit 8 - ustawienie powoduje wygenerowanie przerwania kiedy licznik TC = MR2
- bit 9 - ustwienie bitu spowoduje wyzerowanie licznika kiedy TC = MR3
- bit 10 - ustawienie powoduje zatrzymanie licznika kiedy TC = MR3
- bit 11 - ustawienie powoduje wygenerowanie przerwania kiedy licznik TC = MR3
- bity 31:12 - nie należy wpisywać wartości 1 !
 | |
| Rejestry porównujący MR0 - MR3 |
Poniżej przykład generujący przerwanie co 20 ms, które zmienia stan pinu P0.5 na przeciwny.
1: #include "LPC11xx.h"
2:
3: #define PRESCALER (SystemCoreClock / 1000)
4:
5: // obsluga przerwania od CT16B0
6: void TIMER16_0_IRQHandler(void)
7: {
8: LPC_TMR16B0->IR = 2; // kasowanie flagi przerwania od rejestru porównującego MR1
9: LPC_GPIO0->DATA ^= 1<<5; // zmienia stan na przeciwny na P0.5
10: }
11:
12: int main(void) {
13: LPC_GPIO0->DIR |= 1<<5; // ustawia P0.5 jako wyjsciowy
14:
15: LPC_SYSCON->SYSAHBCLKCTRL |= 1<<7; // wlaczenie zegara dla bloku timera CT16B0
16:
17: // konfiguracja CT16B0
18: LPC_TMR16B0->PR = PRESCALER - 1; // PCLK / 1000 czyli na 1 ms
19: LPC_TMR16B0->MR1 = 20; // wpisanie do MR1 20 czyli 20 ms
20: LPC_TMR16B0->TC = 0; // wpisanie do licznika 0, nie jest konieczne bo po resecie i tak TC=0
21: LPC_TMR16B0->MCR = (1<<3) | (1<<4); // wygeneruj perzerwanie i wyzeruj TC kiedy TC=MR1
22: LPC_TMR16B0->TCR = 1; // start timera CT16B0
23:
24: while(1) {};
25: return 0 ;
26: }
Należy pamiętać by włączyć taktowanie dla danego bloku timera ponieważ bez niego dany blok nie działa, w przykładzie realizuje to linia nr 15. Linie nr 20 można pominąć ponieważ po restarcie / uruchomieniu mikrokontrolera licznik TC jest zawsze wyzerowany. Zastanawiać może zmienna SystemCoreClock która jest potrzebna do wyliczenia wartości dla preskalera. Zmienna ta jest ustawiana przez funkcję SystemInit jeszcze przed wywołaniem zawartości w głównej funkcjii main. Kiedy nie piszemy programu w środowisku LPCXpresso lub nie korzystamy z szablonu generowanego prze to środowisko należy znać taktowanie uC, jeśli taktujemy częstotliwością 48 MHz zapisać można jak niżej
Wielu początkujący programistów szuka sposobu na realizację opóźnienia
#define PRESCALER (48000000 / LPC_SYSCON->SYSAHBCLKDIV / 1000)Wielu początkujący programistów szuka sposobu na realizację opóźnienia
")
